EtherCAT Master for Linux as part of EtherLab®
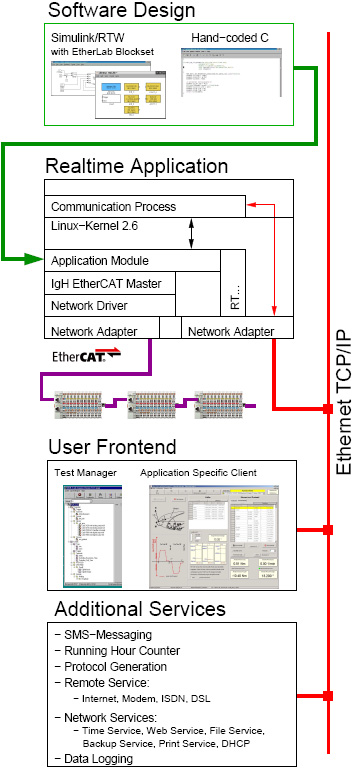
EtherLab is an Open Source Toolkit for rapid realtime application development under Linux®. Using a generic C-API or MATLAB®/Simulink® with the Real-Time Workshop, it provides support for the EtherCAT technology. The IgH EtherCAT Master is a part of EtherLab®.Features of the IgH EtherCAT Master 1.5
- EtherCAT master conforming to IEC/PAS 62407
- Kernel module for Linux 2.6 providing multiple masters
- Drivers for wide-spread Ethernet devices
- Interrupt-less operation
- Easy implementation of additional Ethernet drivers
- Supports any realtime environment
- RTAI, Xenomai, RT-Preempt, etc
- Realtime Application API in kernel- and userspace
- Dynamic slave configuration, including PDOs and SDOs
- Slave groups with different sampling rates (domains)
- Bus monitoring
- SDO and VoE handlers
- Userspace API via C-library
- Master finite state machine (FSM)
- Slave states are read cyclically
- Automatic scanning of the bus after a topology change
- Automatic configuration of slaves
- Implementation of the CAN application protocol over EtherCAT (CoE) mailbox protocol
- Configuration of CoE capable slaves
- SDO information service (dictionary listing)
- SDO transfers both via the application interface and the command-line tool
- Implementation of the Ethernet over EtherCAT (EoE) mailbox protocol
- Virtual network interface for any EoE capable slave
- Implementation of the Vendor specific over EtherCAT (VoE) mailbox protocol
- Communication with vendor-specific mailbox protocols via the API
- Userspace command-line tool 'ethercat'
- Detailed information about master, slaves, domains and bus configuration
- Full bus access for diagnosis and maintenance purposes
- Seamless integration in any GNU/Linux distribution. Includes init script and sysconfig file
- Virtual read-only network interface for debugging and traffic monitoring purposes (using Wireshark, etc.). No additional hardware necessary.