Safety over EtherCAT ドライブプロファイル
安全ロジックをもつ安全システムでは安全ドライブは安全コマンドを安全ロジックから受け取ります。これらのコマンドはドライブに内蔵した安全機能を有効化します。ドライブは状態情報を安全ロジックに送信し、安全ロジックはドライブの状態にしたがい、例えば以下の様な動作 (例、セーフティゲートをオープン) を行うことができます。
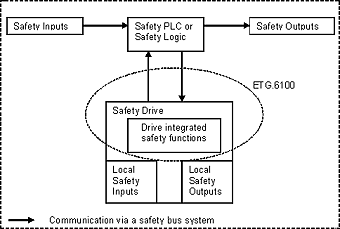
安全ドライブはローカルの安全入力と安全出力のデータも提供します。安全入力は内部の安全機能を有効化するために使用したり、安全状態情報に割り付けたりできます。安全出力は安全状態情報に割り付けたり、安全ロジックのコマンド情報によってセットしたりできます。
ETG.6100 シリーズでは ETG.5100で定義されている Safety over EtherCAT (FSoE) 技術に対応した安全ドライブプロファイルを規定しています。
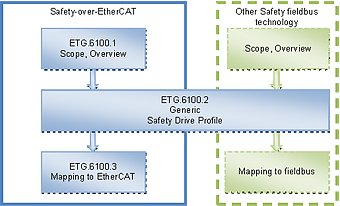
本文書は以下のパートからなります。
- パート 1, ETG.6100.1, 一般的なスコープと関連するパートの概要
- パート 2, ETG.6100.2, 安全機能を内蔵したドライブに対する一般的安全ドライブプロファイルの定義。プロセスデータ構成および IEC 61800 5 2 に準拠した各種安全機能の設定に対する安全オブジェクトの定義。Safety over EtherCATに関係のない定義は含まず、このパートは他の安全フィールドバスに対する安全ドライブプロファイルとして使用可能。
- パート 3, ETG.6100.3, Safety over EtherCAT 技術に対する一般的安全ドライブプロファイルのマッピングを規定
| 説明 | 言語 | タイプ | 日付 | サイズ | Ver. | ステータス | |
|---|---|---|---|---|---|---|---|
 |
ETG.6100 Safety Drive Profile | EN | ZIP | 2020/07/15 | 1,42 MB | 1.3.0 | リリース |
ETG (EtherCAT Technology Group) の書面による許可無く本文書の全体またはその一部を文書の電子的ファイルや印刷物としてコピー、配布およびミラーリングすることを禁止します。