
プレスリリース
宇宙産業では常に最高性能が求められます。特に、軌道上でのアプリケーションは、信頼性に関して高い要求があります。宇宙用機器の打ち上げや運用、場合によっては着陸の際の環境条件も極限状態です。そのため、これまでは主にこのアプリケーションのために開発された技術に頼ってきましたが、何度も最適化が見直されてきました。しかし、最適化するためには当然ながら多額の開発コストに加えサプライヤーの数がかなり少ないため、部品そのものやその運用費用は膨らみ続けてきました。
そのため最近の宇宙産業界では、「ニュー・スペース」と呼ばれる既存の特殊技術をもつ企業だけでなく、「地球で成功したことは宇宙でも通用する」という逆のアプローチも検討されはじめています。もちろん、前提条件は、その技術が宇宙産業特有の要求を満たしていることです。地上におけるモーションコントロールの主な通信技術は宇宙用アプリケーションに完璧に適しています。
コロラドスプリングスで開催された宇宙開発シンポジウムは宇宙産業にとって重要な展示会です。宇宙用ロボットの主要メーカーとともにベッコフオートメーションとEtherCAT Technology Groupは、「世界標準のモーション通信技術が宇宙用ロボットにもたらすメリット」と題するホワイトペーパーを発表しました。ここではまず、フィールドバス技術に対する宇宙ロボットの一般的な要件と特殊な技術要件について説明します。短いサイクルタイムと正確な同期性能に加え、耐放射線チップの利用、ネットワークの再構成による故障ノードの交換、テスト環境やプロトタイプを簡単にセットアップするための幅広い種類のデバイスが利用可能であることなどを挙げています。このホワイトペーパーではEtherCATがどのように宇宙用ロボット特有の技術要件を満たすかを解説しています。
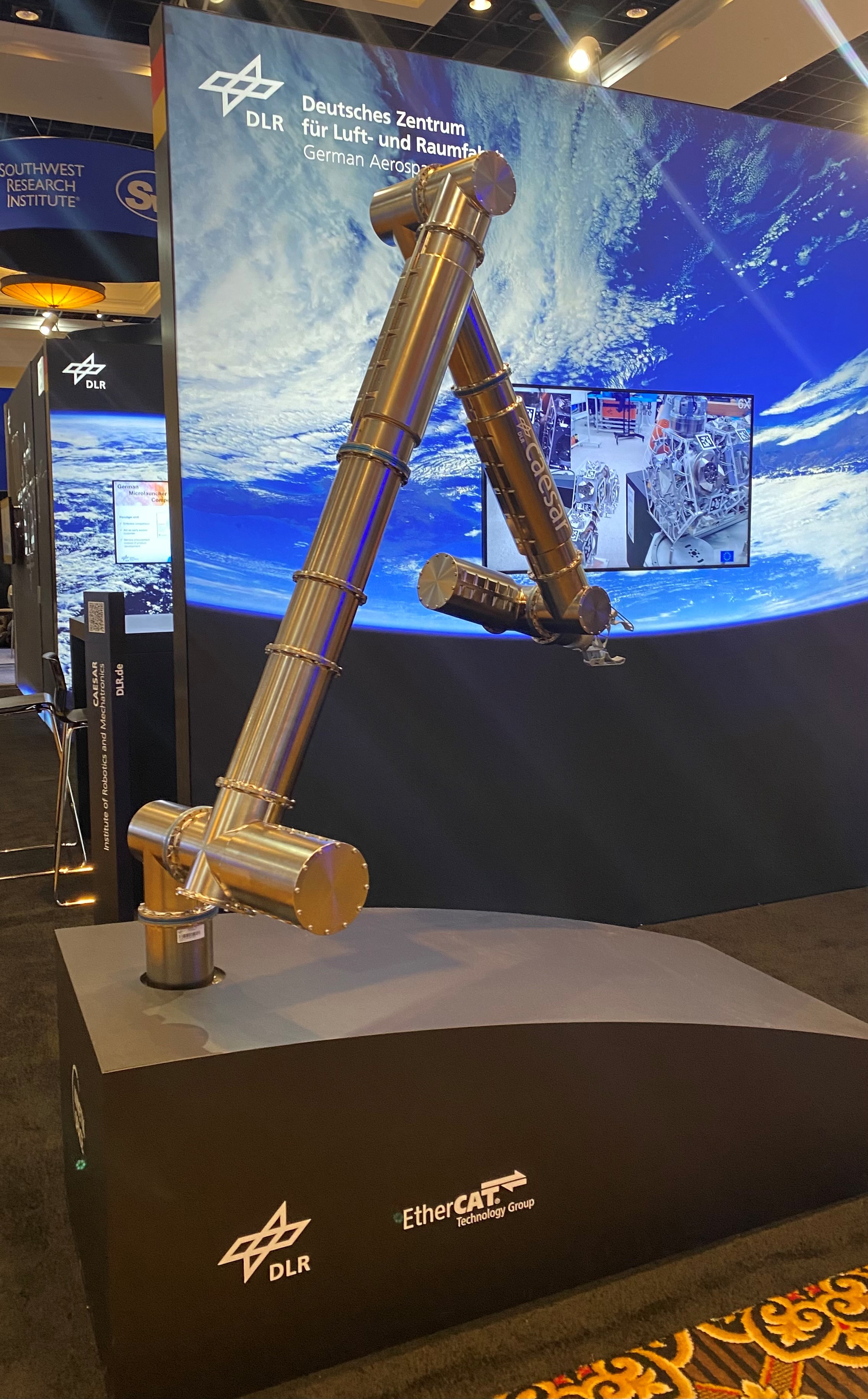
このホワイトペーパーの共著者の中に、現在NASAの月面ゲートウェイ用ロボットアーム「Canadarm3」を開発しているカナダの航空宇宙企業、mda社が名を連ねています。スペースシャトルの「Canadarm」やロボットアーム「Canadarm2」もmda社の製品です。後者はISSでの宇宙遊泳の中心的な役割を担っています。NASAの火星探査機「パーセバランス」用のロボットアームを開発したのは、カリフォルニア州のモティブ・スペース社です。テザーズ・アンリミテッド社は、小型宇宙船が宇宙で組立・製造・保守作業を行うための小型7自由度マニピュレーターを宇宙産業に提供するKRAKEN®ロボットアームの製造会社です。ドイツ航空宇宙センターDLRのロボット・メカトロニクス研究所では、長年にわたり様々なアプリケーションにおいてEtherCATを採用しており、既にISSでEtherCATベースのシステムが使用されています。EtherCATロボットCAESAR (Compliant Assistance and Exploration SpAce Robot) は、構造物の組み立て、衛星の保守・修理、スペースデブリの除去など、宇宙での様々なタスクのために開発されたロボットです。
CAESARは宇宙開発シンポジウムにおいて注目を集めEtherCAT in Space Roboticsのホワイトペーパーを発表する理想的な場となりました。
記述
宇宙開発シンポジウムで展示された 宇宙用ロボット"CAESAR"

コンタクト
一般向けプレス情報については次のメールアドレスまでお問い合わせください:press@ethercat.org
プレスアーカイブ
プレスアーカイブ 2018
プレスアーカイブ 2017
プレスアーカイブ 2016
プレスアーカイブ 2015
プレスアーカイブ 2014
プレスアーカイブ 2003-2013